2023. 12. 3. 22:55ㆍ논문 리뷰
WalkON Suit라는 powered exoskeleton은 cybathlon 2020에서 금, 동 메달을 수상했다. 이 슈트는 강력하고 특별한 high-power actuation module, robotic legs with parallel-elastic-actuation modules, gait-pattern generation, iterative-learing algorithm of human behavior 에 기반해 개발되었다.
[Powered Exoskeletons for Daily Life Support of Paraplegics]
척수와 하지 보조기 같은 assistive 기술 기기와 목발과 같은 보행 보조 기구는 spinal cord injury (척수 부상)(SCI) 환자의 의학적 치료와 재활의 필수 요소이다. powered exoskeleton은 하반신 마비 환자를 위한 의학적 치료, 재활, 이동 수단으로서의 새로운 보조 기술 장치로 주목받고 있는데, 왜나하면 완전히 장애가 있는 모터와 센서의 기능 때문에. 강인한 걸음걸이 안정성, 밸런싱, 무게 이동, 이동 속도, 안정성은 중요한 요소들이다.
상업화된 powered exoskeleton은 사용자에게 하반신 모션(엉덩이와 무릎)을 전기 모터를 협동함으로서 제공한다. 그러나, 그들의 역학적 디자인이 전체 로봇 시스템의 무게 감소에 집중되었기에, 액츄에이션 파워는 제한되었다. 결과적으로, 그들은 종종 semiactive-actuation 방법(제어가능한 댐퍼, 브레이크)를 요구한다. 이것은 daily living을 위한 실행 가능한 전략이 아니다; 불충분한 액츄에이션 파워는 사람이 걷고, 계단을 올라가는 데 도움을 줄 수 없다. 그러므로, exo는 반드시 일상생활을 위해 큰 액츄에이션 파워와 완전한 controllability이 필요하다.
게다가, 대부분의 상업적 로봇은 발목 관절의 고려 없이 개발되었다. 아킬레스건은 인체에서 가장 크고 강한 힘줄이다. ... 결과적으로, 몇몇 exo는 발목근육의 수동적인 자유도만을 이용한다. 그러나, 발목근육 액츄에이션 모듈 없이는, 동시에 발가락 밀어넣기와 등근육 움직임은 합리적이지 않다. 발가락을 밀어내는 힘은 걸음 속도를 유지하는 가장 중요한 요소이고, stance phase에서 등근육은 발 드랍을 방지하기 위해 필요하다.
하반신 마비 환자의 걷기 목표를 달성하기 위해, 상업화된 exo는 일반적인 걸음을 위한 미리 정의된 joint trajectory를 적용하는데, 왜냐하면 최소한의 에너지 소비와 함께 걸음 속도를 증가시키는 데 효율성 때문에. 일반적인 걸음에서, 인체의 자연적 dynamics(hip joint의 움직임, ankle joing의 토크)를 이용해서 cog를 옮길 수 있다. 그러나, 하반신 마비 환자들은 스스로 다리나 허리를 움직일 수 없다. 게다가, exo의 자유도는 인체보다 적으므로, 이런 환자들이 exo의 도움 없이 자신의 cog를 제어한다고 기대하기 어렵다. 결과적으로, 미리 정의된 일반적인 걸음의 joint trajectory는 하반신 마비 환자를 위한 최고의 옵션이 아니다.

상업화된 exo는 지면에서 걸을때 오직 5도의 기울기까지 협상할 수 있는데, 왜냐하면 갑작스런 지형에서 cog를 제어하는 것은 평평한 지면보다 매우 어렵기 때문이다. 그러므로, 그들은 갑작스런 지형에서 걷기 혹은 계단을 내려가고,올라가는 것과 같은 일상 활동을 돕는 데 제한적인 기능이 있다.
더군다나, 적절한 걸음걸이 구제거은 개인별로 다 다르다, 왜냐하면 하반신 마비 환자들은 구별된 신체적 특성을 가지고 있거나 걸음 도중 움직임의 경향성이 있다. 그러므로, 파일럿의 특성을 고려 없이는 생성된 모션이 실제 사용자들에게 적용됬을 때 적합성 문제가 있을 것이다. 현재는, 물리치료사들이 joint trajectory의 파라미터를 수동으로 수정한다. 그럼에도 불구하고, 이 비효율적인 과정이 파일럿에게 상당한 불편을 야기하는데, 왜냐하면 그들은독립적으로 exo를 이용할 수 없고, 반복된 걷기를 통한 시행착오를 겪어야 하기 때문이다. exo가 활용성이 높고 사용자의 일상샐황에 자연스럽게 통합되기 위해서는, 다양한 사용자에 맞게 걸음걸이 궤적을 자동적으로 수정하는 것은 물론 적절한 걸음걸이 궤적을 생성하는 것이 필수적이다. 하반신마비환자들은 자신만의 걸음걸이 패턴이 있다.
[Hardware Design of the WalkON Suit]
수트는 하반신의 움직임을 생성한다. 전체적인 시스템은 로봇 다리 한 쌍과 백팩(메인 제어 유닛, 회로, 배터리, 목발 쌍, UI 화면, 지지대)로 구성되어있다.
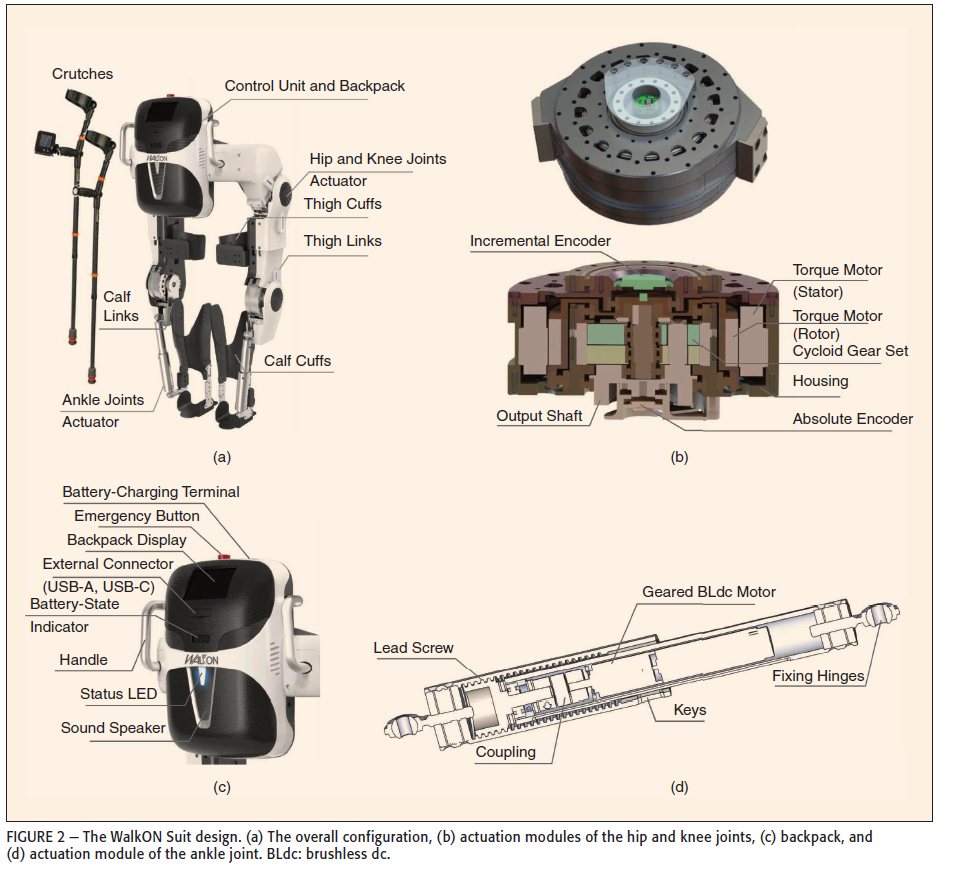
액츄에이션 모듈은 6개의 bldc모터가 각 다리의 hip, knee, ankle joint로 구성된다. 이동 도중, ankle joint는 stance phase에서 강한 임피던스로 체중과 관성을 견디기 위해, 고-강성의 스프링처럼 작동한다. 그러므로, lead-screw 방법이 ankle-joint 액츄에이션 모듈에 사용되었다. 배터리 방전과 같은 상황은 충돌 상황이 발생해 파일럿이 다칠 수 있으므로, exo는 반드시 충분한 mechanical impedence를 가져야 한다.
dynamically optimized gait-assisting (DOGA) - knee mechanism이 수트에 적용되었다. DOGA-knee는 paralell-elastic-actuation (평행-탄성)module이다. 이는 오직 목표-각도 영역(knee가 95%이상 구부러짐)일 때, 액츄에이터에 보조 토크를 제공한다. 스프링이 압축되며 45Nm의 도움 토크를 95도 확장 방향에서 생성하고, 더 구부러지면, 더 강한 토크가 생성된다. DOGA-knee는 도움 토크를 83도 앞으로 생성해 걸음에 영향을 미치지 않는다. DOGA-knee를 적용함으로 서 knee-joint-actuation 모듈은 확장 방향으로 180Nm의 최대 토크를 달성하고, 계단을 올라가는 동작을 부드럽게 수행한다.
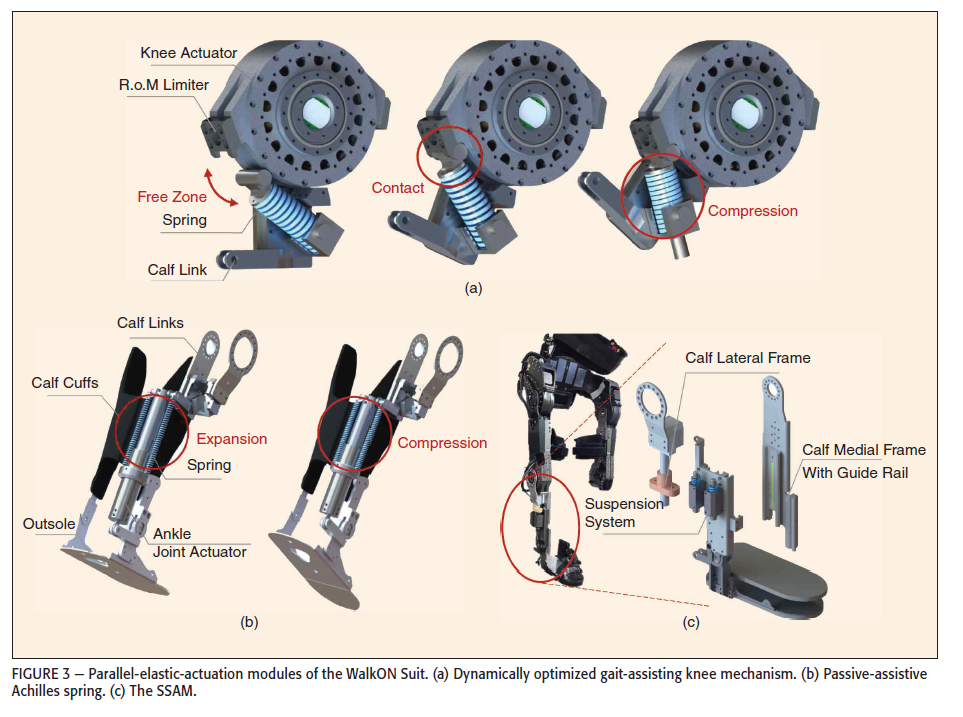
스프링이 ankle-joint actuation과 아킬레스건에 모두 평행하기에, spring force의 방향은 항상 ankle-joint actuation과 아킬레스건의 actuation force에 평행한다. stance phase에서, 질량과 관성에 의한 ankle joint의 dorsiflexion(발을 발등 쪽으로 구부리는 것) 모션은 ankle-joint actuation module의 임피턴스에 의해 방해된다. 스프링의 에너지는 증가하고, 그러므로 누적된 에너지는 발가락을 밀어냄으로서 방출된다.
shank(정강이)-shock-absorption(흡수) 메커니즘(SSAM)이 사용되고, 이동 중 지면으로부터의 반복적인 충격을 흡수한다. 이는 일시적으로 swing phase에서 댐퍼가 다음에 오는 충격을 준비하기 위해서 확장된다.
[Motion-Control Algorithms]
수트는 버튼과 같은 외부 장치에서부터 파일럿의 의도를 파악한다.
reference motion을 수행하기 위해, exo는 robust tracking performance를 보장하기 위해 motion-control 알고리즘이 필요하다. 이런 점에서, disturbance observer(외란 관찰자)(DOB)가 제어 알고리즘에 포함되어 있다.

DOB는 외인성의 외란(중력, 모델 불일치, 인간 움직임)을 거절할 수 있다. 결과적으로, DOB는특정 불확실한 변수와 같은 것에 대해 강인함을 보장함으로서, 인간이 포함된 모델을 미리정의된 수학적 모델로 형상화 할 수 있다. 더군다나, 추가적인 feedback ontroller나 feedforward filter같은 controller가 더 나은 제어 성능을 위해 DOB에 연결되었다.
실제와 명목상의 모델의 큰 불일치는 DOB 안의 Q-filter의 주파수를 제한하여, 가능한 주파수 범위를 축소하고 심지어 시스템의 심각한 오류를 초래해, 파일럿의 안전을 위험하게 한다. 모델의 불일치를 상당히 줄이고 제어 성능을 강화하기 위해, 명목상의 수트의 모델은 joint actuator의 하중 측면이 변경됨에 따라, 보행 중, exo의 물리적 특성이 심하게 변경된 것으로 간주되었다. stance phase에서, joint actuator는 파일럿의 신체 전부의 하중을 견디고, 반면에 swing phase에서는 파일럿의 하반신을 공중에서 자유롭게 원하는 지점으로 옮긴다.
....
파라미터 조정 알고리즘(PAA)이 다른 모델의 파라미터를 구별하기 위해서 수트의 걸음걸이 PHASE를 위해 독립저긍로 개발되었다. 이러한 파라미터들로부터, feedforward filter와 feedback controller gain들이 다양한 명목상의 모델에 관하여 control input의 연속성을 유지하고 robust tracking performance를 보장하기 위해 재디자인되었다. fig4.c는 기존의 single-model DOB와 비교하여, 수트에 사용된 hybrid-model DOB의 control 성능을 보여준다.

제안된 controller를 사용함으로서, 수트는 놀라운 control 포포몬스를 달성했다; 다른말로, 의도한 모션을 현실화했다.
[Gait-Pattern Generation]
걷기가 일상생활에서 가장 기본이고 필수적이기에, 수트는 주로 exoskeletal leg의 도움과 함께 걷기 모션의 안전성과 편안함을 제시하는 데 집중했다. 하반신마비 환자의 신체적 능력과 exodml 관절의 DOF는 완전히 비장애인과 다르기에, 이상적인 gait pattern이 필요하다.

앞다리의 정강이가 trunk-기울기에 의존하면서, 지면과 수직이다.
...
cybathlon 2020
가장 주목할 만한 결과
1. 파일럿이 어떤 실패 위험 없이 세 번의 시도를 마무리함
2. 다른 신체적 특성을 가진 남성, 여성 파일럿이 놀라운 성과를 보임
3. 양 파일럿이 세 번째 시도 안에 공식적인 기록을 세움 - 현재의 기술이 하반신 마비 환자에게 2016년 cybathlon에서 로봇과 비교해 장기의 탑승 시간을 제공할 수 있다-는 가능성을 제시함
conclustion
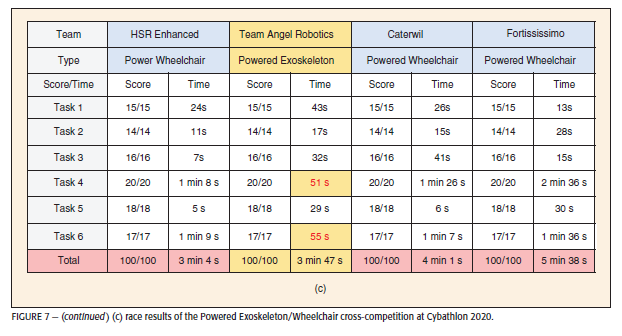
이 수트는 대회 참가 뿐만 아니ㅏ라 장애인들의 일상 생활을 돕기 위해 만들어짐. 수많은 기술이 개발됨 - active-actuation module, parallel-elastic actuaion, braces, control unit.... 이것들을 기반으로 cybathlon 2020에서 금메달과 동메달을 수상함. 게다가, 수트의 속도가 휠체어의 속도와 유사해짐. 특별히, 수트는 휠체어보다 계단오르기,내리기와 문을 통과해 지나가기에서 더 빠른 속도를 보임. 왜냐하면 이것들은 일상샐황에서의 장애물이기 때문에, exo이런 것들에서 휠체어보다 빠르다는 것은 주목할 만 함.