2024. 11. 25. 18:44ㆍ비선형 제어
https://web.mit.edu/nsl/www/videos/lectures.html
https://web.mit.edu/nsl/www/videos/lectures.html
Slotine Lectures on Nonlinear Systems Lecture Duration Textbook and References 1. Introduction 1:14:56 Example 1.1, Sections 3.1, 3.2 2. Basic Lyapunov Theory 1:18:12 Sections 3.3, 3.4.1, 3.4.2 3. Lyapunov Stability Analysis 1:18:25 Section 3.4.3 4. C
web.mit.edu
1강 Introduction
세계의 시스템은 대부분 nonlinear이다.
Lyapunov theroy 리아프노프 : 러시아 수학자
일반적인 시스템
$$ \dot{x} = f(x) : autonomous, time-invariant $$
$$ \dot{x} = f(x, t) : non \; autonomous, time-varying $$
평형점(equilibrium point) :
$$ f(x_{eq}) = 0 : may \; have \; several \; solution! $$
ex) 3.1 pendulum

댐핑토크 : 진자의 회전 운동을 감쇄시키는 힘, 회전속도에 비례해 반대방향으로 작용
$$ torque_{damping} = -b\dot{\theta } \\ mR^2\ddot{\theta } = -mgsin(\theta)R-b\dot{\theta } \\ mR^2\ddot{\theta} + mgsin(\theta)R+b\dot{\theta }=0 $$
이를 state equation으로
$$ x_1=\theta \\ x_2=\dot{\theta } \\ \dot{x}_1 = x_2 $$
$$ \dot{x}_2 = \frac{-b}{mR^2}x_2 - \frac{g}{R}sin(x_1) $$
평형점은
$$ f(x)=0 \Leftrightarrow \begin{cases}
x_2=0 & \text{ } ,\dot{\theta} =0 \\ sin(x_1)=0
& \text{} ,\theta=0 \; or \;\pi
\end{cases} $$ 해가 여러 개 이다!
수학 기호
$$ \forall : for\; any \\ \exists : there \; exists \; at \; least \; one $$
W.L.O.G - Without Loss Of Generality : 특정 조건을 주더라도 문제 상황에 큰 영향이 없을 때, 풀이읭 용이함을 위해 조건을 맞추겠다는 의미
stability in the sense of lyapunov

ball centered at x=0, radius R
{$ {x, \left\| x \right\| < R} $}
$$ \forall R>0, \exists r>0 \\ if\;x(t=0) < r \\ then\;x(t) < R\;when\;\forall t > 0 $$
local asymptotic stability : 위의 조건 더하기
$$ \exists\;r_0 > 0\;such\;that \\ if\;x(t=0)<r_0 \\ then\;x(t)\to 0\;as\;t\rightharpoonup \infty $$
asymptotic stability 에서 명백히 stability condition이 유지되었다.
global asymptotic stability : r_0가 무한대일때
exponential stability
starting in some ball of radius r_0
$$ \exists\alpha >0, \exists \lambda >0 $$ 알파는 큰 수, 람다는 시간관련
$$ such\;that\;\forall t\geq 0,\;\left\| x(t)\right\| \leq \alpha \left\| x(t=0)\right\|e^{-\lambda t}$$
global : r_0가 무한대일때
$ Remark\; ; \; if\;\alpha =e^{\lambda \tau_0}\\then\;\alpha e^{-\lambda t}=e^{-\lambda (t-\tau_0)} $ tau_0는 extra delay
테일러 전개 : 다항식이 아닌 함수를 다항식으로 만드는 방법
* 함수가 0이 되지 않고 무한번 미분 가능한 함수만 가능
테일러 급수 : 테일러 전개로 얻은 다항식
$$ f(x)=\sum_{k=0}^{\infty}\frac{f^k(a)}{k!}(x-a)^k $$
매클로린 급수 : x=0에서 근사하는 테일러 전개의 특별한 경우
$$ f(x)=\sum_{k=0}^{\infty}\frac{f^k(0)}{k!}(x)^k $$
예) $$ f(x)=e^x $$ 이를 무한개의 식을 가진 다항식으로 표현할 수 있다고 가정
$ e^x = a_0 + a_1x + a_2x^2 + a_3x^3 + \cdots\;\;x=0\;일\;때\;a_0=1 $
위 식을 미분하면
$ e^x=a_1+2a_2x+3a_3x^2+ \cdots\;\;x=0\;일\;때\;a_1=1 =\frac{1}{1}$
위 식을 미분하면
$ e^x=(2\cdot1)a_2+(3\cdot2)a_3x+ \cdots\;\;x=0\;일\;때\;a_2=\frac{1}{2!} $
$\Rightarrow e^x=1+x+\frac{x^2}{2!}+\frac{x^3}{3!}+\cdots $
2강
Linearization and Global stability
다음 시스템에서
$$ \dot{x}=f(x),\;f(0)=0 \\ \dot{x}=f(0) +\frac{\partial f}{\partial x}(x-0) + higher\;order\;term $$
이 때 f의 x에 대한 쟈코비안 : 밑의 A 행렬과 같음
$ \frac{\partial f}{\partial x}=\begin{pmatrix}
\frac{\partial f_1}{\partial x_1} & \cdots & \frac{\partial f_1}{\partial x_n} \\
\vdots &\ddots & \vdots \\
\frac{\partial f_n}{\partial x_1} & \cdots & \frac{\partial f_n}{\partial x_n} \\
\end{pmatrix} $
첫 번째 행 : f_1의 gradient $ \nabla f_1 $
* gradient(기울기) : 함수의 각 성분의 편미분으로 구성된 벡터
linear approximation : $$ \dot{x}\approx Ax $$
다음과 같은 시스템에서
$$ \dot{x}=f(x, u) =f(0) +\frac{\partial f}{\partial x}(x-0) + \frac{\partial f}{\partial u}(u-0) + higher\;order\;term $$
linear approximation : $$ \dot{x}\approx Ax + Bu $$
$$ if\;u(x)=k(x)=0+\frac{\partial k}{\partial x}(x-0) + higher\;order\;term \\u=kx$$
$$ \dot{x}=(A+Bk)x +h.o.t $$
ex) 3.4
$$ \dot{x_1}=x_2^2 + x_1cos(x_2) \\ \dot{x_2} = x_2 + (x_1 + 1)x_1 + x_1sin(x_2) $$
x=0이 평형점이다.
$$ \dot{x_1}\approx 0 + x_1\cdot1 = x_1 \\ \dot{x_2}= x_2 + 0+x_1 + x_1 x_2 \approx x_1 + x_2 $$
또한
$$ A = \begin{pmatrix}
\frac{\partial x_1}{\partial x_1} & \frac{\partial x_1}{\partial x_2} \\
\frac{\partial }{\partial x_1}(x_1 + x_2) & \frac{\partial }{\partial x_2}(x_1 + x_2) \\
\end{pmatrix} = \begin{pmatrix}
1 & 0 \\
1 & 1 \\
\end{pmatrix}$$
lyapunov's linearization method
$$ \dot{x}=f(x)=Ax = h.o.t, \; f(0)=0 $$
만약 A가 restrictly stable하다면, 모든 고윳값은 LHP에 있다. 이러면 이 평형점은 점근적 안정
만약 A가 restrictly unstable 하다면, 적어도 A의 고윳값 중 하나는 RHP 에 있다. 이러면 X=0은 안정하지 않다.
만약 A가 marginally stable 하다면, 모든 고윳값은 LHP에 있지만 아마도 허수축에도 있을 수 도 있다.
lyapunov's direct method
nonlinear spring과 nonlinear damper 시스템
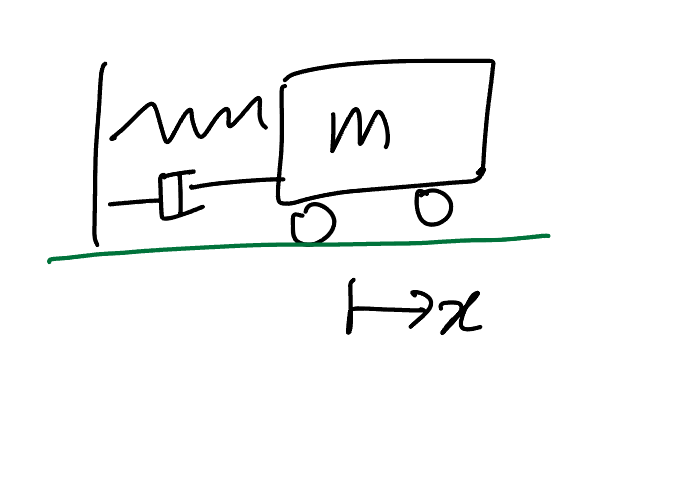
$$ m\ddot{x} + b\left| \dot{x}\right| \dot{x} + k_0x + k_1x^3 = 0 $$
이 때 평형은 x=0 과 x_dot = 0
총 에너지 = 키네틱 에너지 + 포텐셜 에너지
$$ V(x) = \frac{1}{2}m\dot{x}^2 + \int_{0}^{x}(k_0y + k_1y)dy = \frac{1}{2}m\dot{x}^2 + \frac{k_0x^2}{2} + \frac{k_1x^4}{4} $$
V(x)는 스칼라이며 0보다 크거나 같고, V(x) 가 0인 것과 x=x_dot=0 은 동차이다.
$$ \frac{\mathrm{d} }{\mathrm{d} t}V(x) = m\dot{x}\ddot{x} + (k_0x + k_1x^3)\dot{x} = \dot{x}(-b\left| \dot{x}\right|\dot{x}-k_0x-k_1x^3) + (k_0x+k_1x^3)\dot{x} = \dot{x}(-b\left| \dot{x}\right|\dot{x})=-b\left| \dot{x}\right|^3\leq 0 $$
이 값은 nonlinear damper 에 의해 power가 dissipated(소멸)된 것이다.
3장
lyapunov's direct method
autonomous system 즉, time-invariant인 $$ \dot{x}=f(x) $$ 이 있고, 부드러운 스칼라 함수 V(x)에 대해
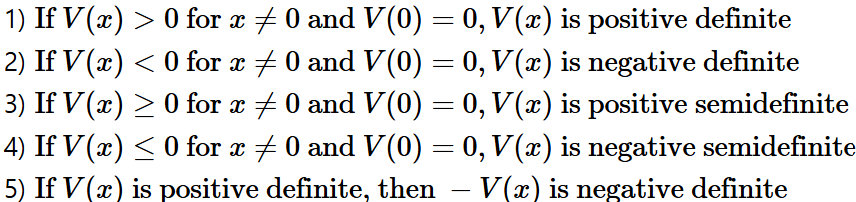
이다.
이 때 $$V(x)\;가\;positive\;definite\;이고\;\dot{V(x)}\;가\;negative\;semi\;definite\;라면 \\ 시스템은\;x=0\;에서\;stable\;하다.$$
$$ 만약\;\dot{V(x)}가\;negative\;definite\;라면\;시스템은\;x=0\;에서\;점근적으로\;stable\;하다$$
$$ 만약 \; r_0=\infty \; 라면 \; globally \; stable \; 하다.$$
ex)3.9
$$ \dot{x}+c(x)=0 \\ c(x) \; is \; continous, \; x \cdot c(x)>0 \;for \; x \neq 0 $$
$$ suppose \; V(x)=x^2, \; V \; is \; positive \; definite $$
$$ \dot{V(x)}=2x\dot{x}=-2x \cdot c(x)<0 \; for \; x \neq 0, \; \dot{V} \; is \; negative \; definite $$
$$ \left\| x\right\|\to \infty, \; V \to \infty \; : \; radial \; unboundness \; condition $$
$$ 평형점 \; : \; x=0, \; globally \; asymptotically \; stable $$
$$ \dot{x}=-x^3, \; c(x)=x^3, \; G.A.S \\ Linearization \; : \; \dot{x}=0, \; marginally \; stable $$
$$ \dot{x}+x=sin^2(x) \; c(x)=x-sin^2(x), \; G.A.S \\ because \; sin^2(x) \leq \left| sin(x)\right| < \left| x \right| \; for \; x \neq 0 $$
'비선형 제어' 카테고리의 다른 글
| matrix calculus (0) | 2024.11.28 |
|---|